




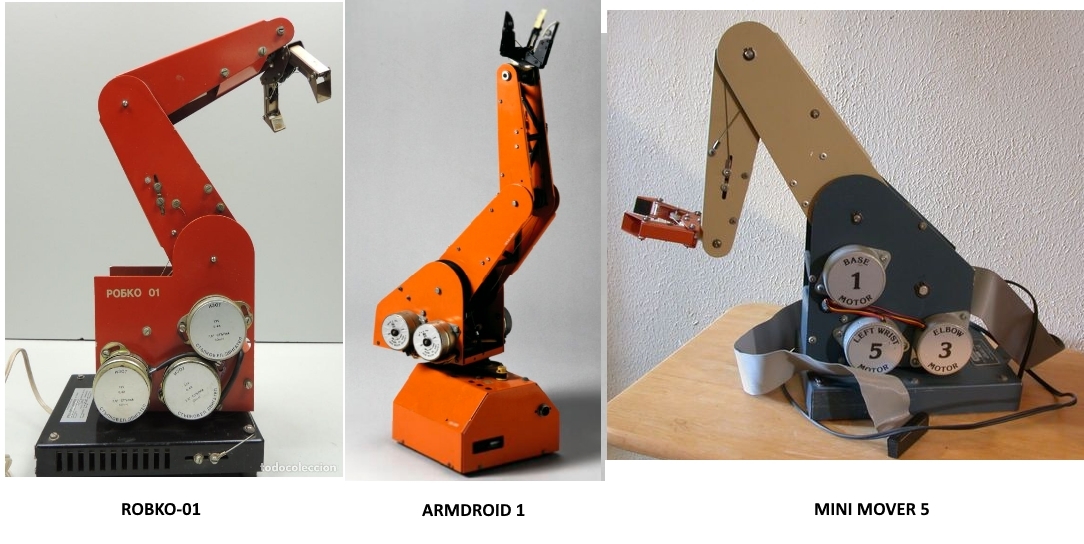
Robko-01 es un robot búlgaro del inicio de los 80′s con cinco grados de libertad desarrollado con fines académicos [1]. Es una “versión” del robot Armdroid 1 (Colne Robotics Ltd) [6,7] y casi idéntico al Minimover-5 [2,4,5].
Sus principales características son:
- grados de libertad: 5 + pinza
- radio de trabajo: 35.6cm
- capacidad de carga: 1500gr
- fuente de alimentación: 12V
- consumo: hasta 2.5A (400mAx6)
- motores: 6 de 12V, 400mA, 7.5º
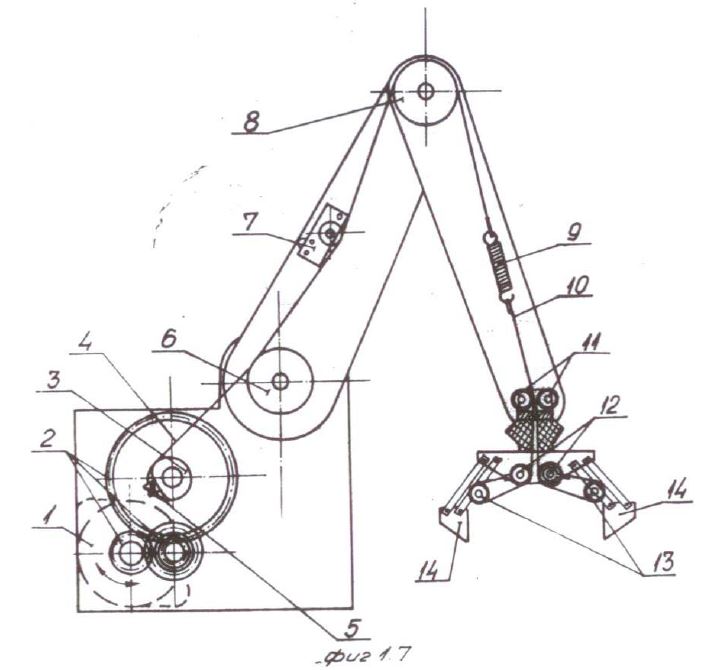
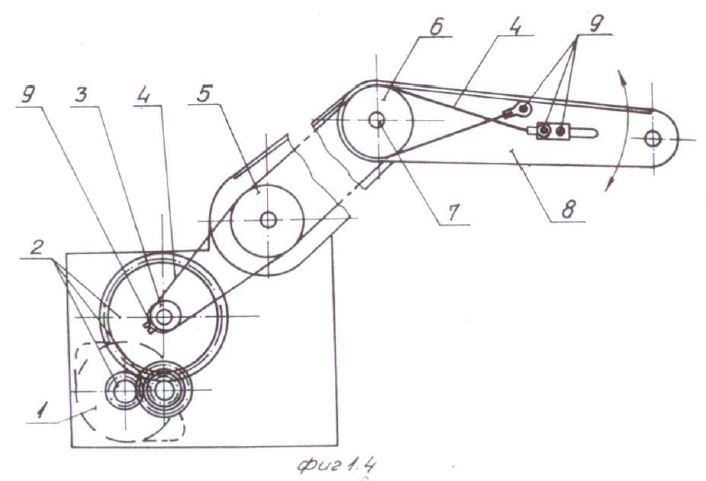
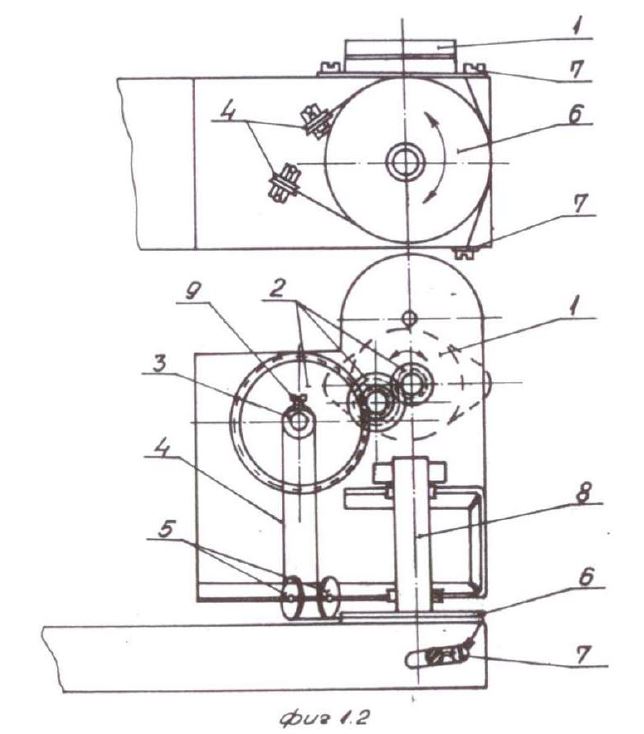
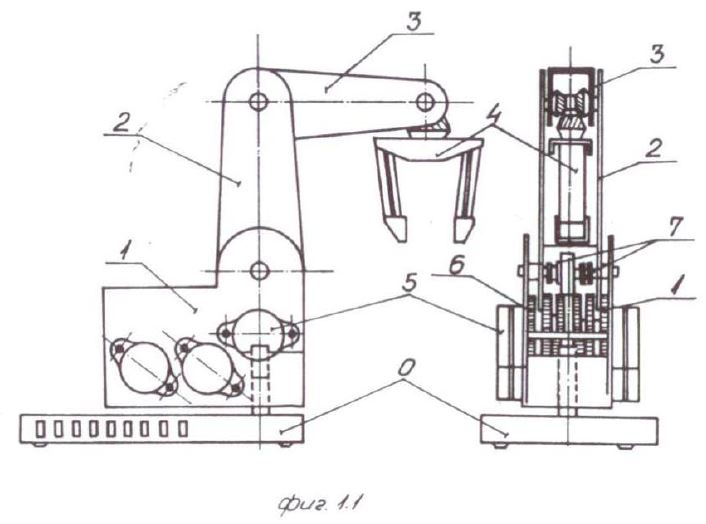
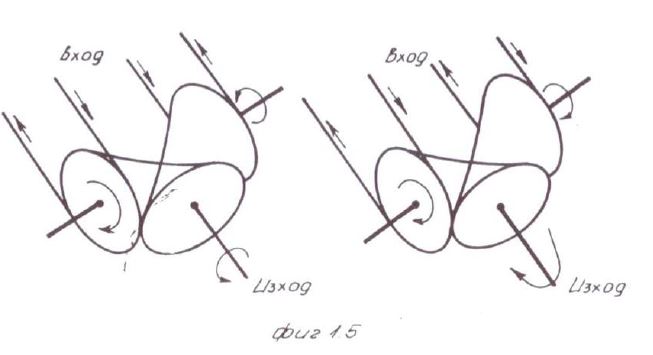
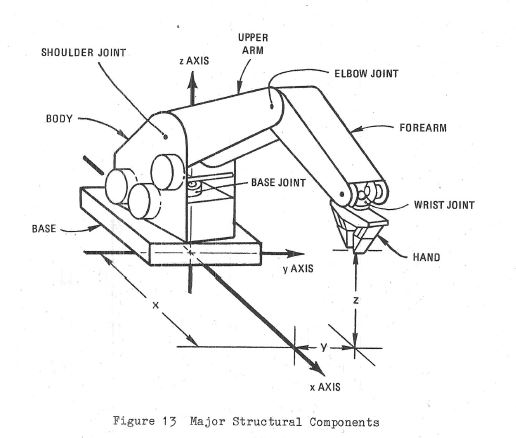
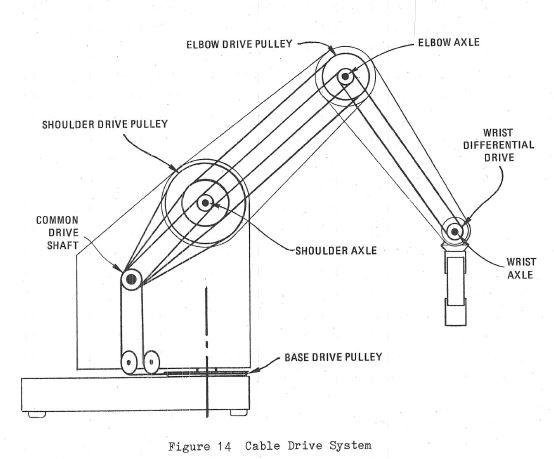
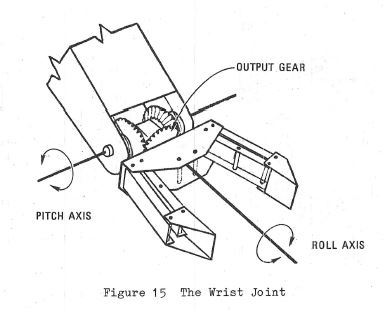
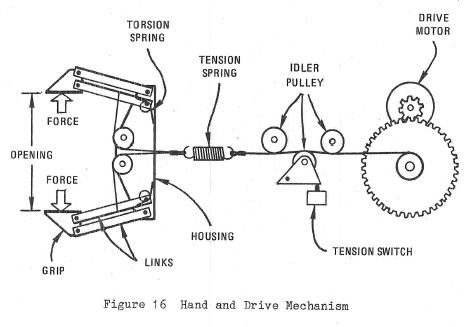
Dispone de 6 motores paso a paso para mover cada una de las articulaciones (base, shoulder, elbow, left wrist, right wrist, grip), apoyado en un sistema de engranajes, poleas y alambres.
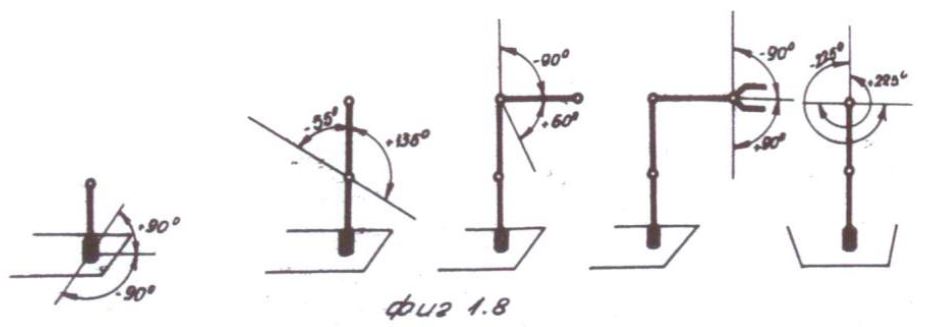
Las siguientes capturas del manual de usuario muestran los esquemas de las articulaciones:
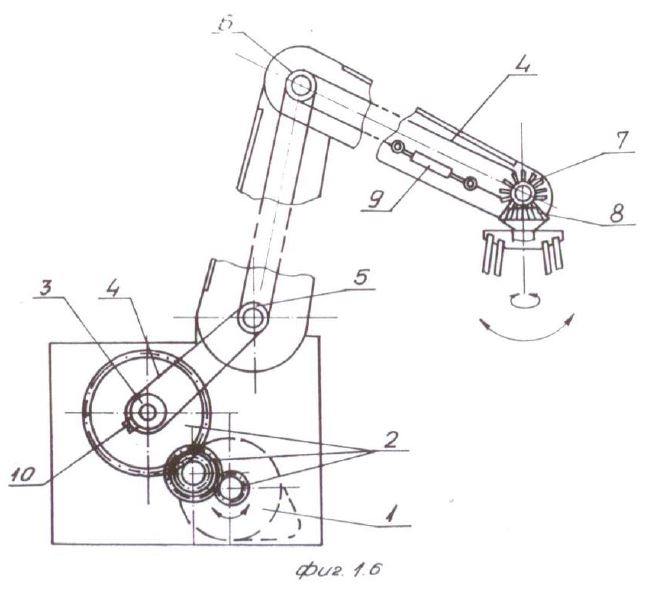
Las siguientes capturas del manual de usuario del robot Mini Mover 5, que es prácticamente igual:
Adquisición:
En la web todocolección se consiguió un robko 01: https://www.todocoleccion.net/antiguedades-tecnicas/impresionante-antiguo-brazo-robotizado-robko-01-3h-anos-70-muy-raro~x109429835
Modificaciones:
A partir de ahí, después de intentar hacerlo funcionar tal y como se adquirió, y ver diversos ejemplos (ver desarrollos relacionados) se procedió a:
- Sustituir la controladora de motores paso a paso
- Creación de un mando para el manejo manual de las articulaciones
- Creación de un módulo Bluetooth/AP-wifi para que una aplicación pudiera manejar el brazo
Sustitución controladora de motores paso a paso:
Originalmente trae una placa controladora para manejar los 6 motores paso a paso
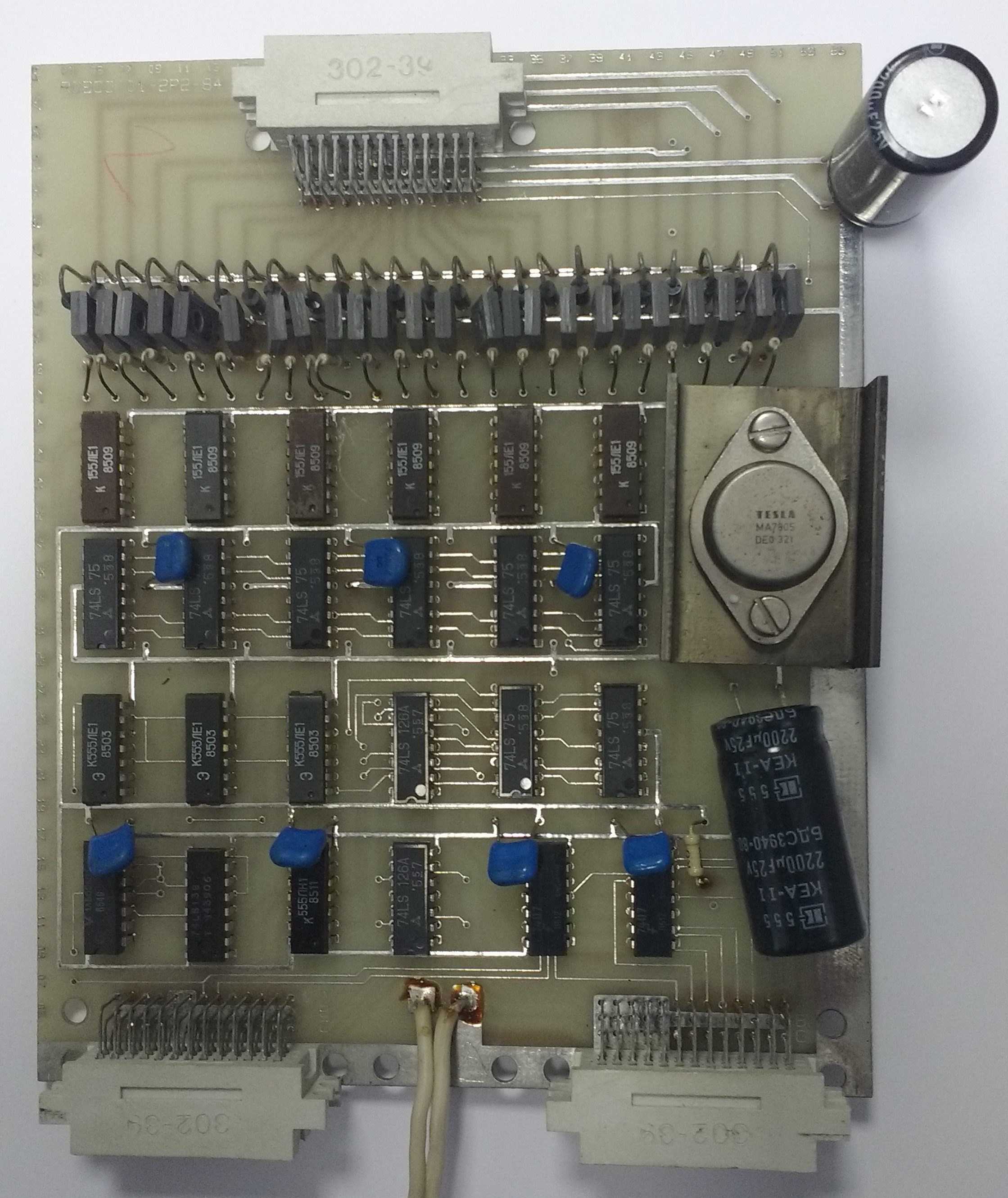
En la parte superior tiene un conector al que se conectan los motores
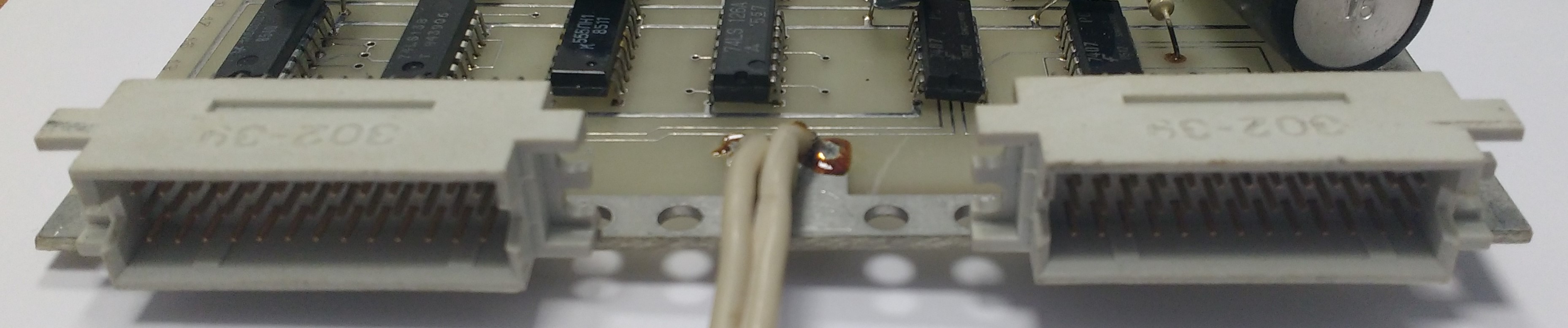
Y en la parte inferior dos conectores que se conectaban al ordenador que lo controlaba
Se ha sustituido la placa que incorporaba por 6 controladoras de motoras paso a posa “Easy Driver“
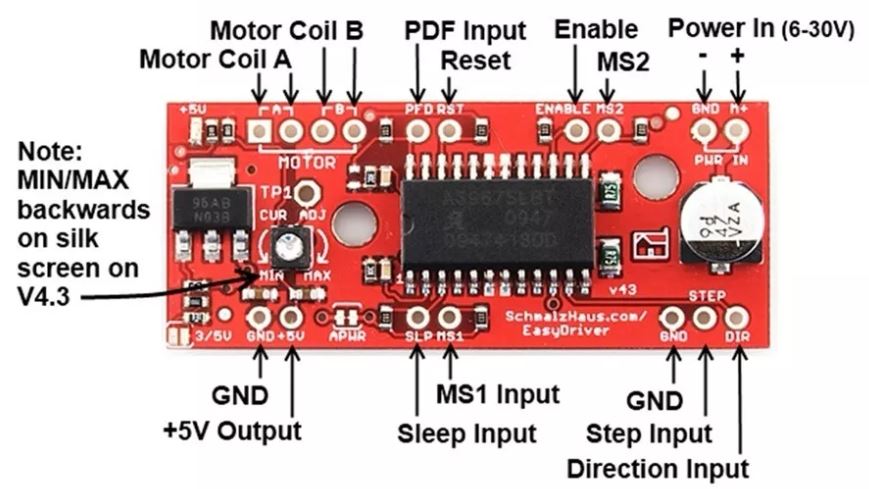
EasyDriver: https://learn.sparkfun.com/tutorials/easy-driver-hook-up-guide
Cada una de las placas controla un motor y va conectado al conector original
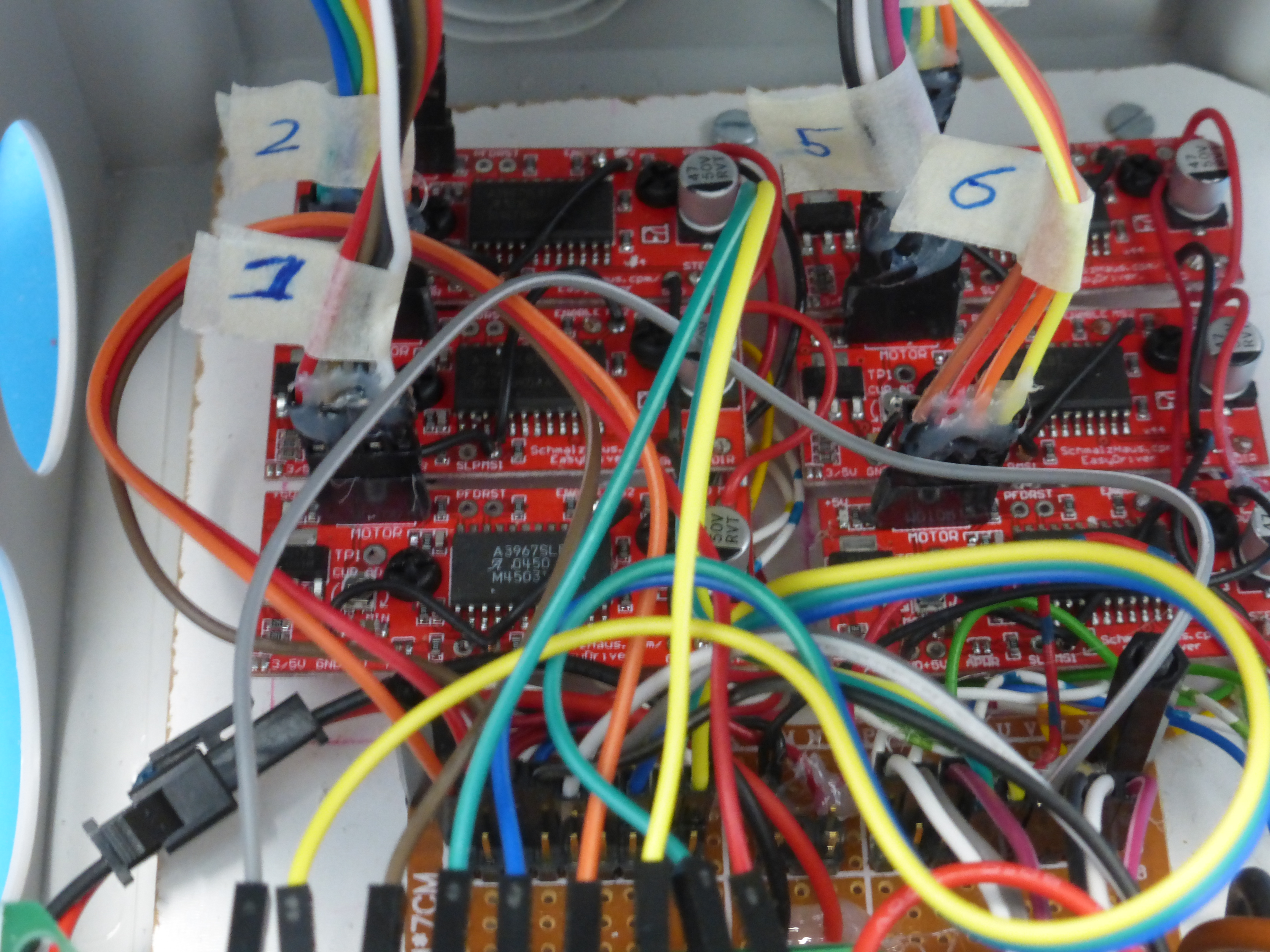
Y las líneas de control va a un conector DB-25
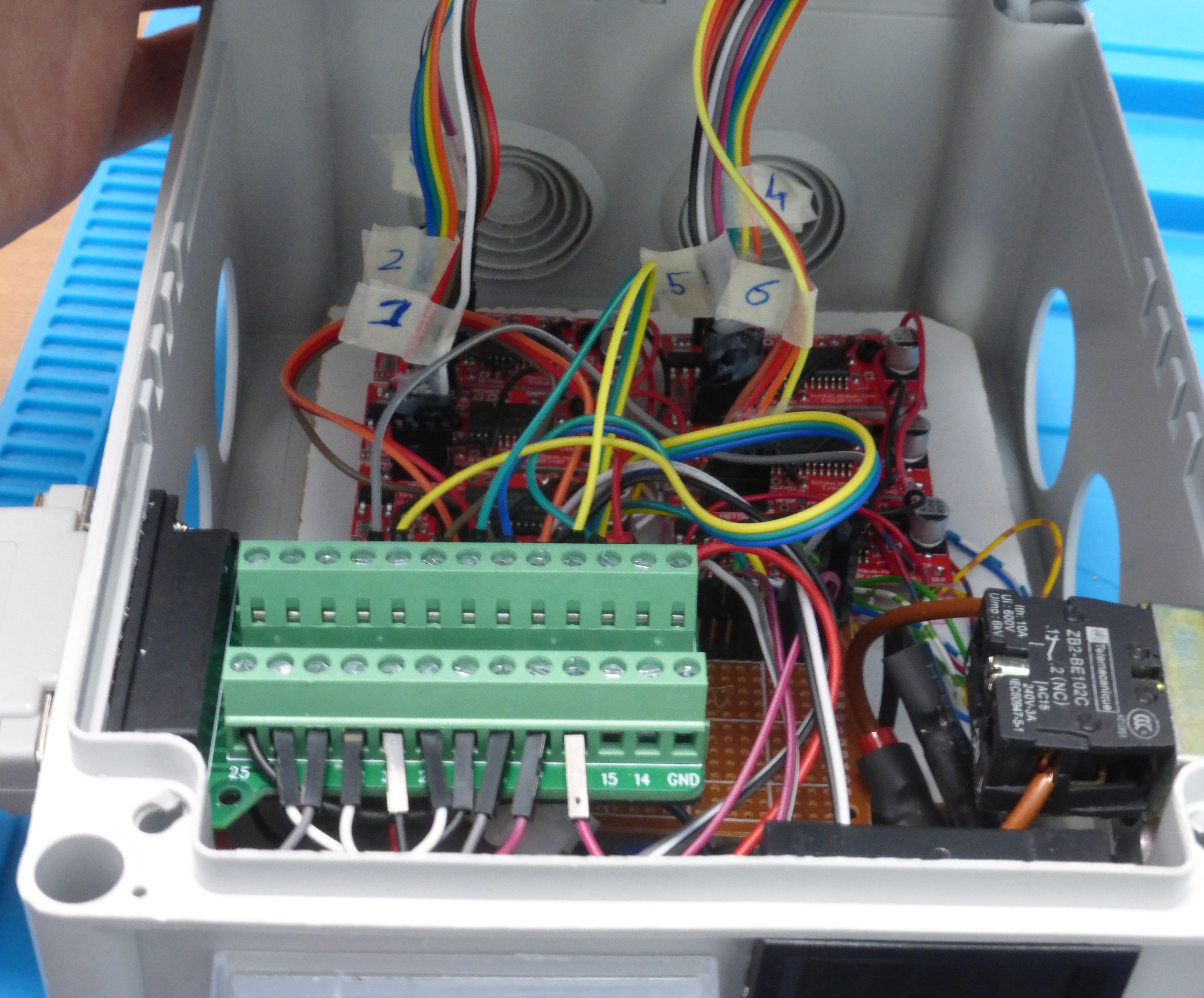
Esta caja es la que se alimentará a 12V (que se pasarán también al DB-25). Se le ha añadido una seta de emergencia y medidores de voltaje y corriente.
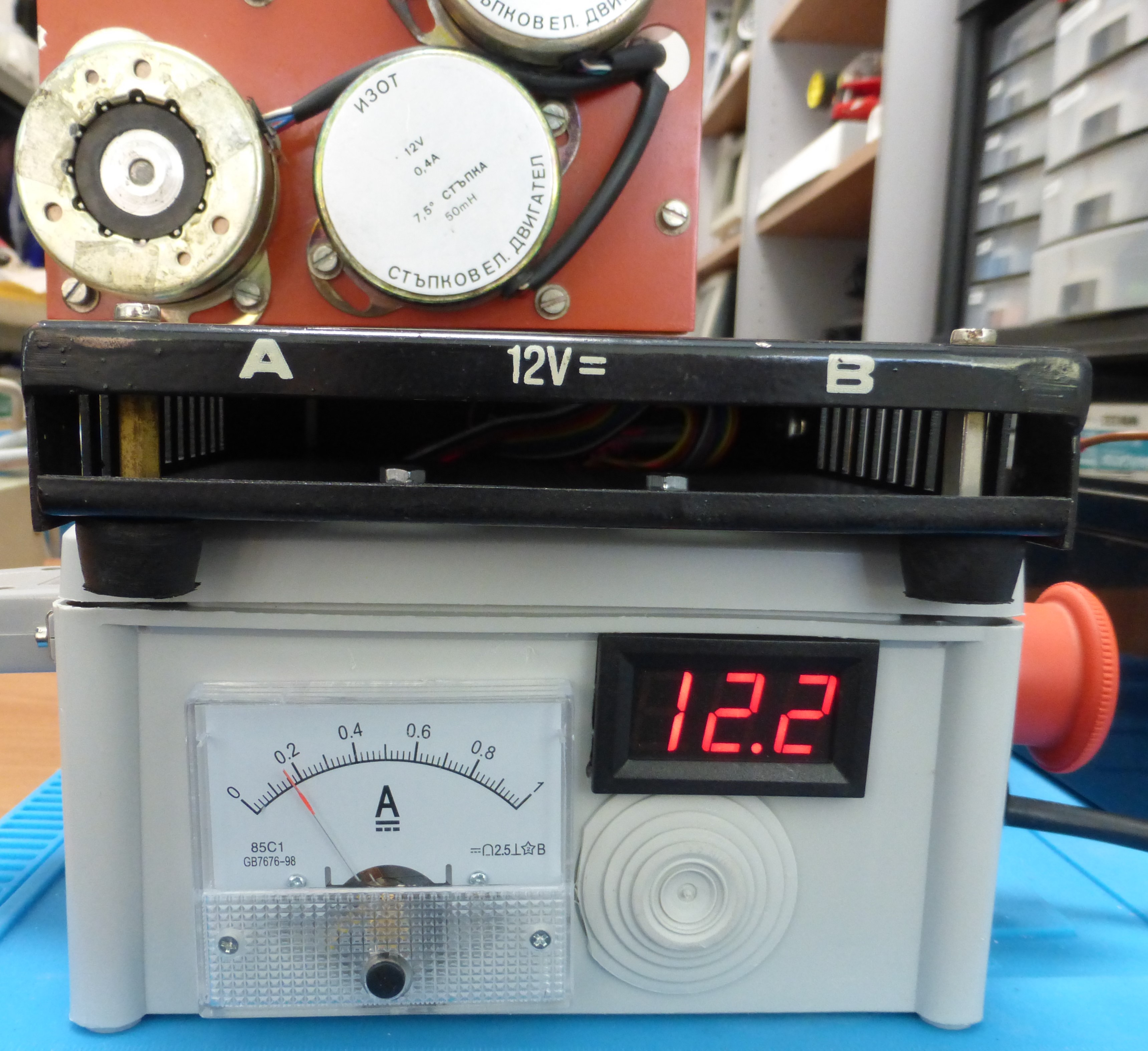
Ahora el brazo tiene por una parte la entrada de alimentación y por otra un conector DB-25 que va a permitir su manejo a través de una serie de señales (Direction, Enabled, Step), y puede alimentar a las placas que se conecten a él.
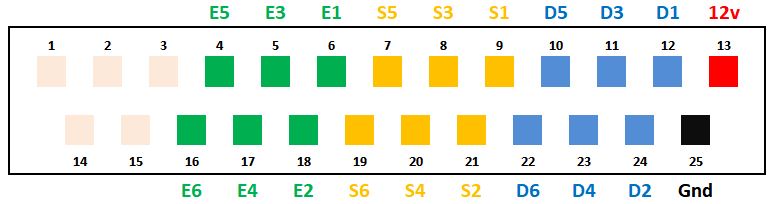
Que se corresponden con las líneas de entrada de cada una de las controladoras de motores
Que a su vez manejan cada uno de los motores de las articulaciones
Creación de un mando para el manejo manual de las articulaciones
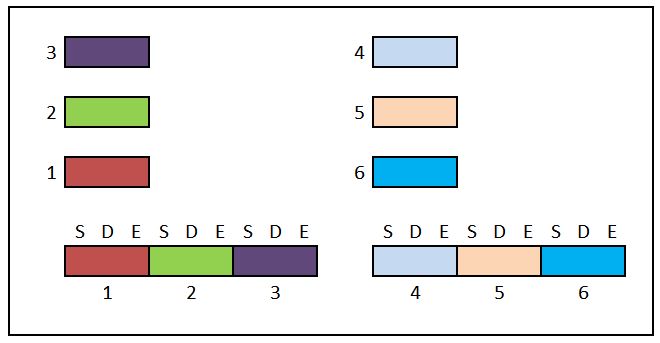
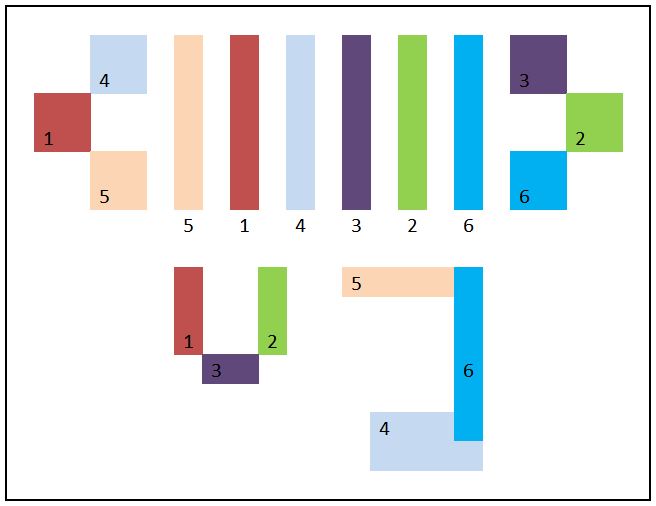
Para el manejo sencillo de cada articulación se ha creado una botonera con dos botones (Up-Down) para cada una de las articulaciones, y un slider para seleccionar la velocidad de movimiento.
La velocidad de movimiento seleccionada es la misma para todos los motores, es decir, las líneas de step están todas unidas a una señal que crea pulsos según el valor del slider. Se podrían haber empleado líneas individuales para distintas velocidades de distintos motores. Lo que si que se puede hacer es mover varios motores al mismo tiempo.
La siguiente imagen muestra la botonera:

La botonera irá conectada al brazo mediante el conector DB-25. Para generar las señales correspondientes y leer las pulsaciones de los botones se emplea un Arduino Mega 2560.
Se tienen como entradas 12 botones (Up-Down para cada motor) y un Slider, y como salidas, las 6 líneas de dirección y activación para cada motor, y la línea que marca los pasos.
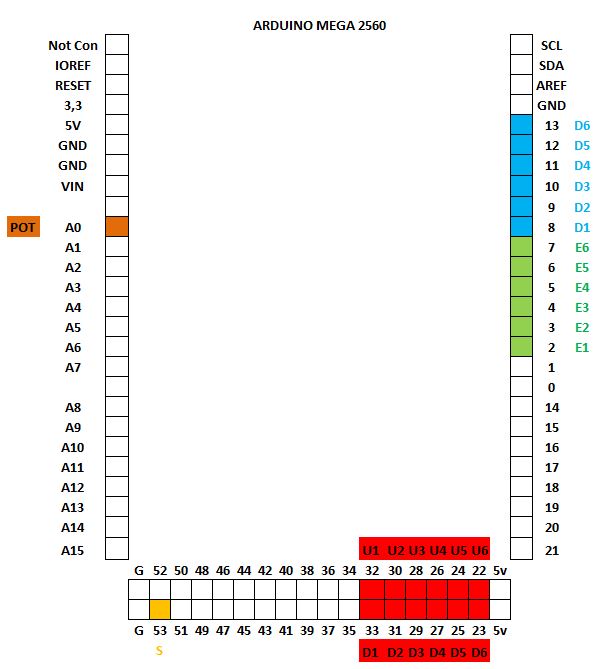
Los botones y el slider:
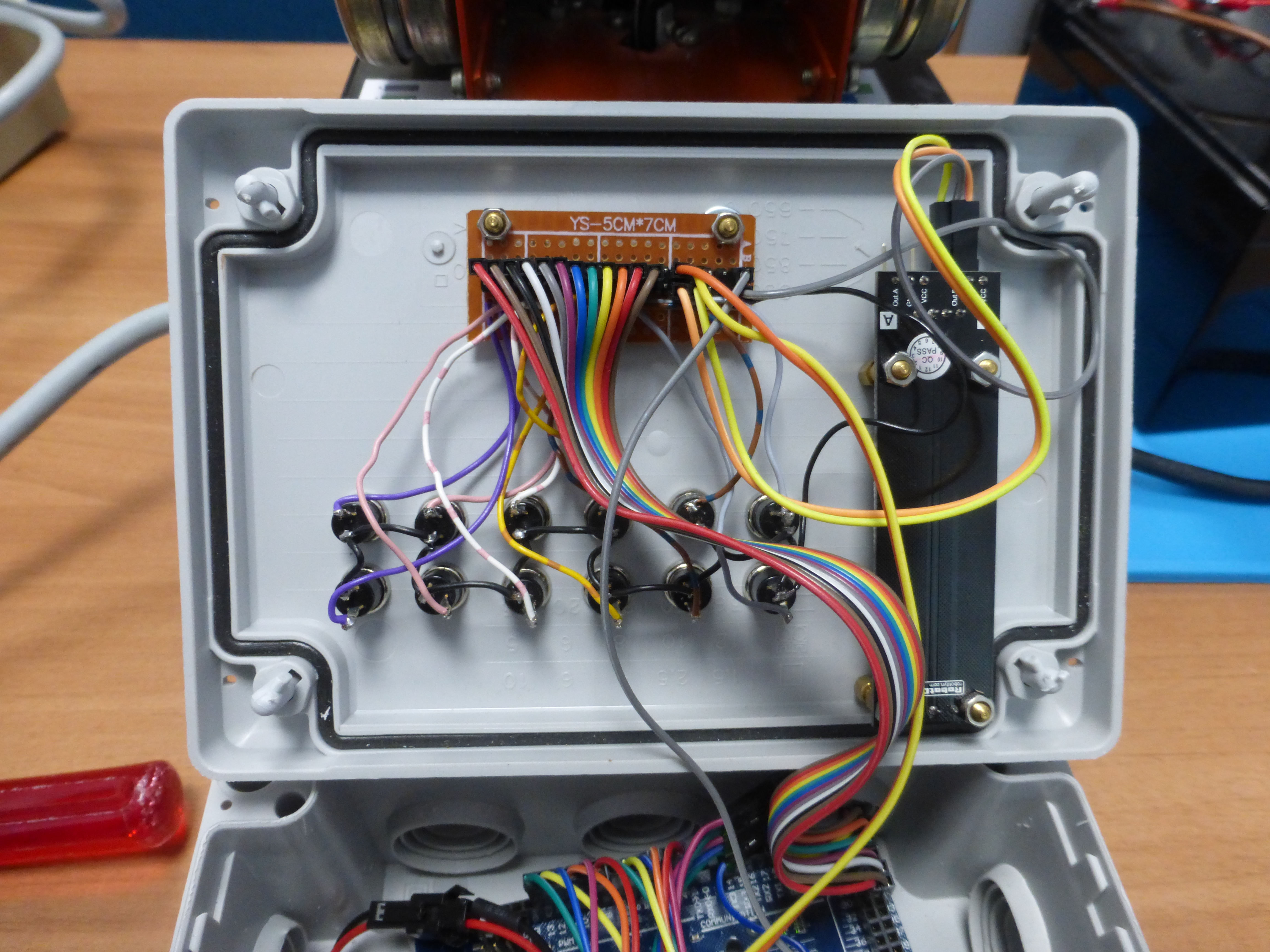
Las líneas de salida se conectaran al conector DB-25, del que también se extrae la alimentación.

Creación de un módulo Bluetooth/AP-wifi para que una aplicación pueda manejar el brazo
En sustitución del mando manual anterior se ha creado un adaptador bluetooth/wifi que se conecta al conector DB-25 del brazo de igual manera que se hace con el mando manual y le trasmite las órdenes al brazo.
En este caso, en una versión inicial, se le pueden mandar desde una aplicación externa una serie de tramas que indiquen la acción a realizar:
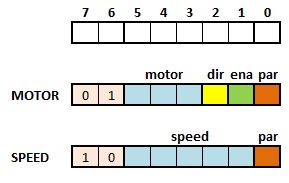
Estas tramas podrán llegar vía bluetooth o wifi indistintamente, de manera que podrá activar o desactivar un motor, indicando la dirección de movimiento, y se podrá cambiar la velocidad, lo mismo que se hacía con el slider en el mando manual, todo esto desde una aplicación externa.
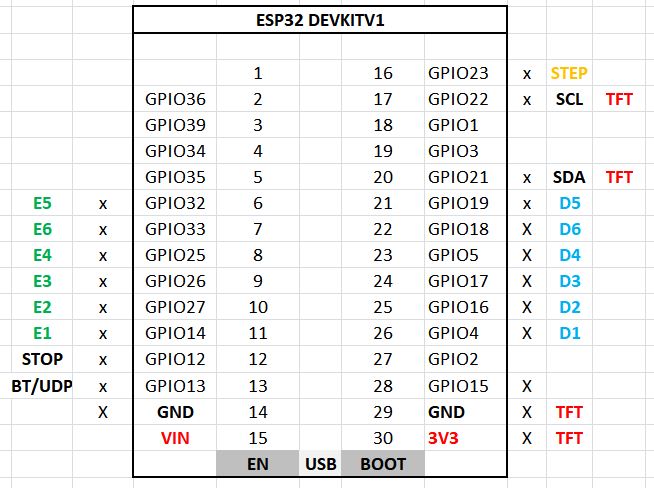
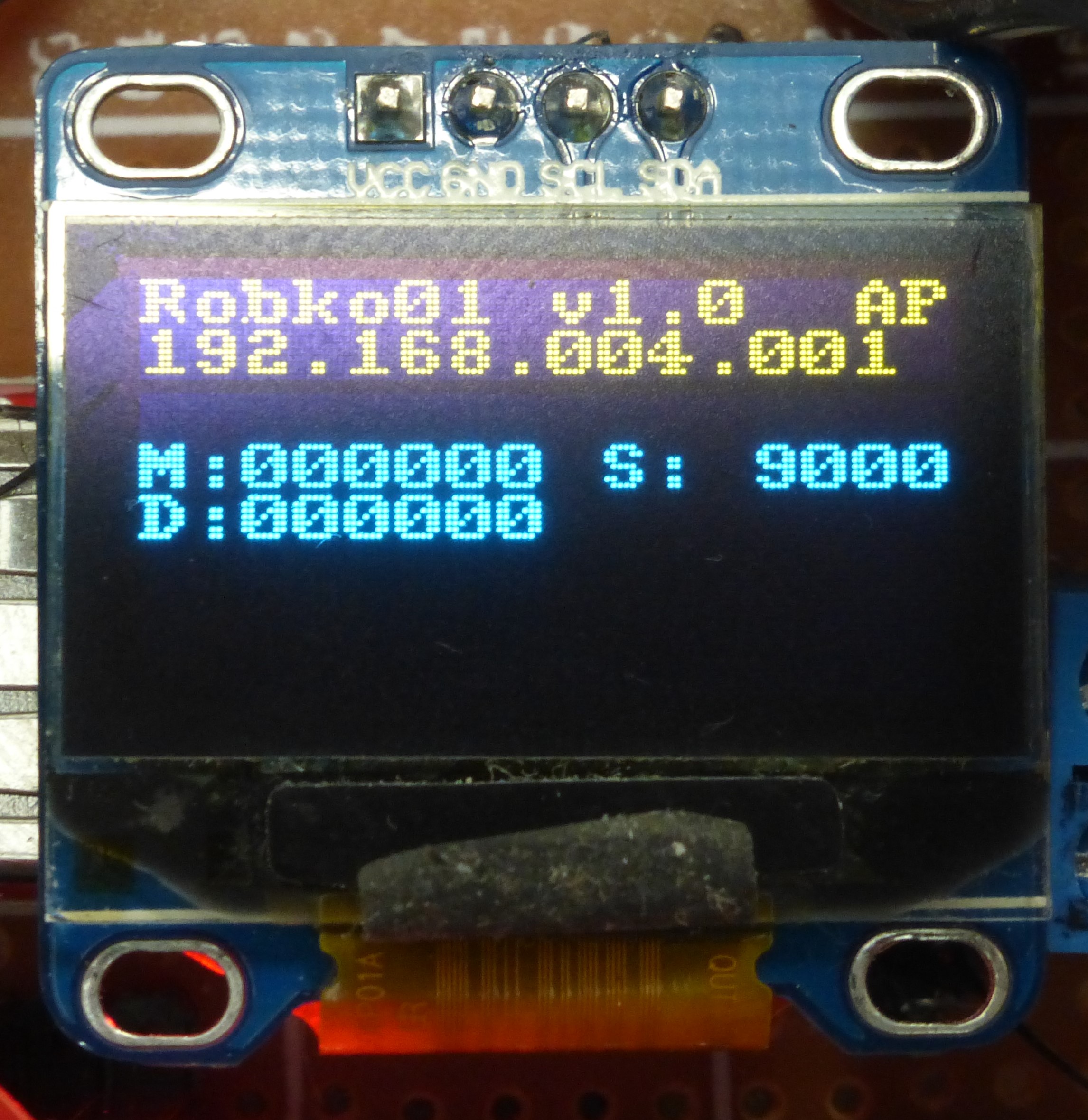
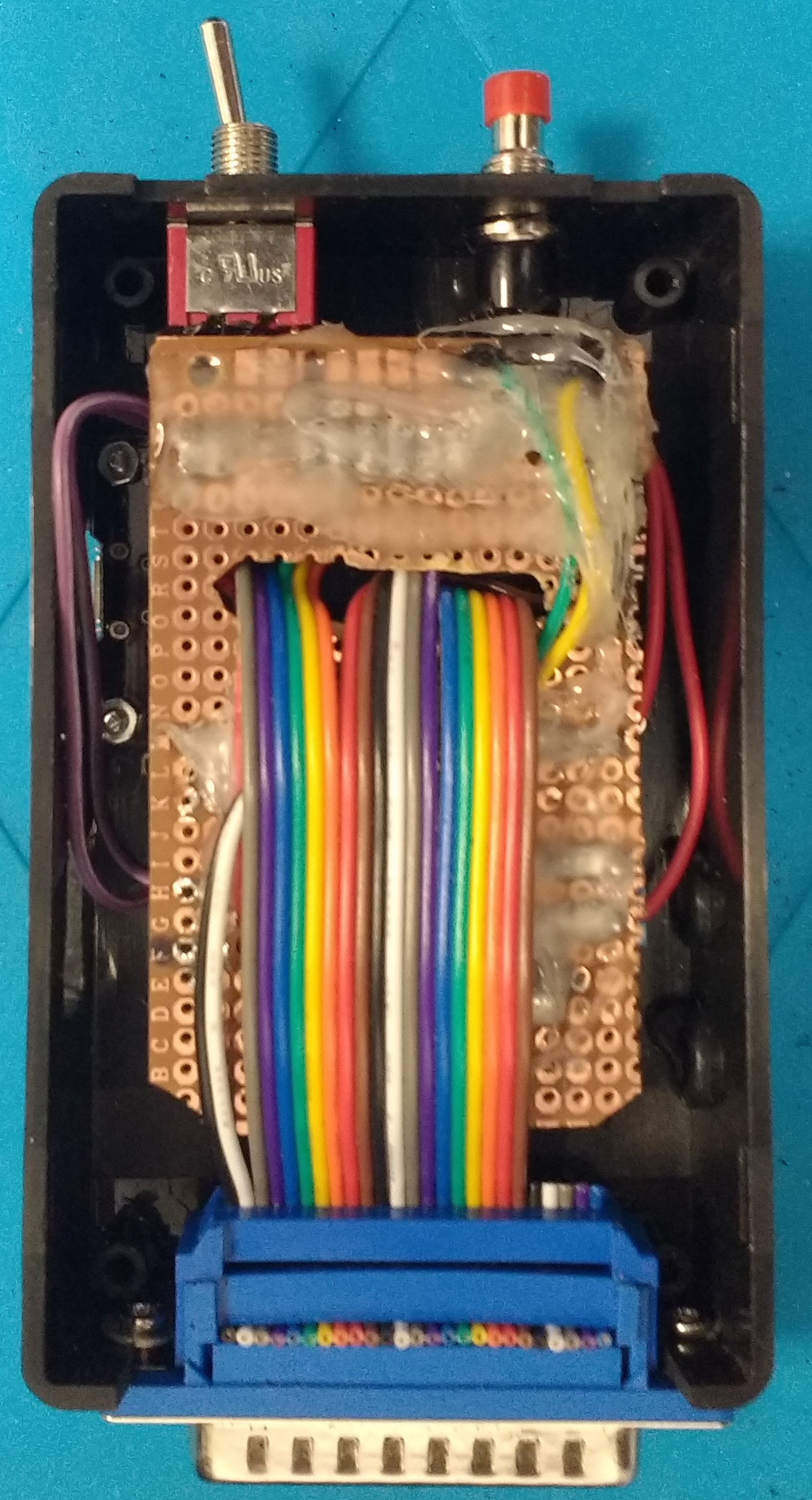
En este caso se ha empleado una placa ESP32 a la que se ha conectado un selector de wifi o bluetooth, un botón de emergencia para que pare todos los botones, y una pantalla TFT para ver la información que le va llegando. Además se emplean las mismas líneas que en el caso de mando manual para la conexión al DB-25, y la alimentación de la placa también se toma del brazo (en esta versión con un conversor DC-DC para seguir alimentando la placa ESP32 por el conector USB)
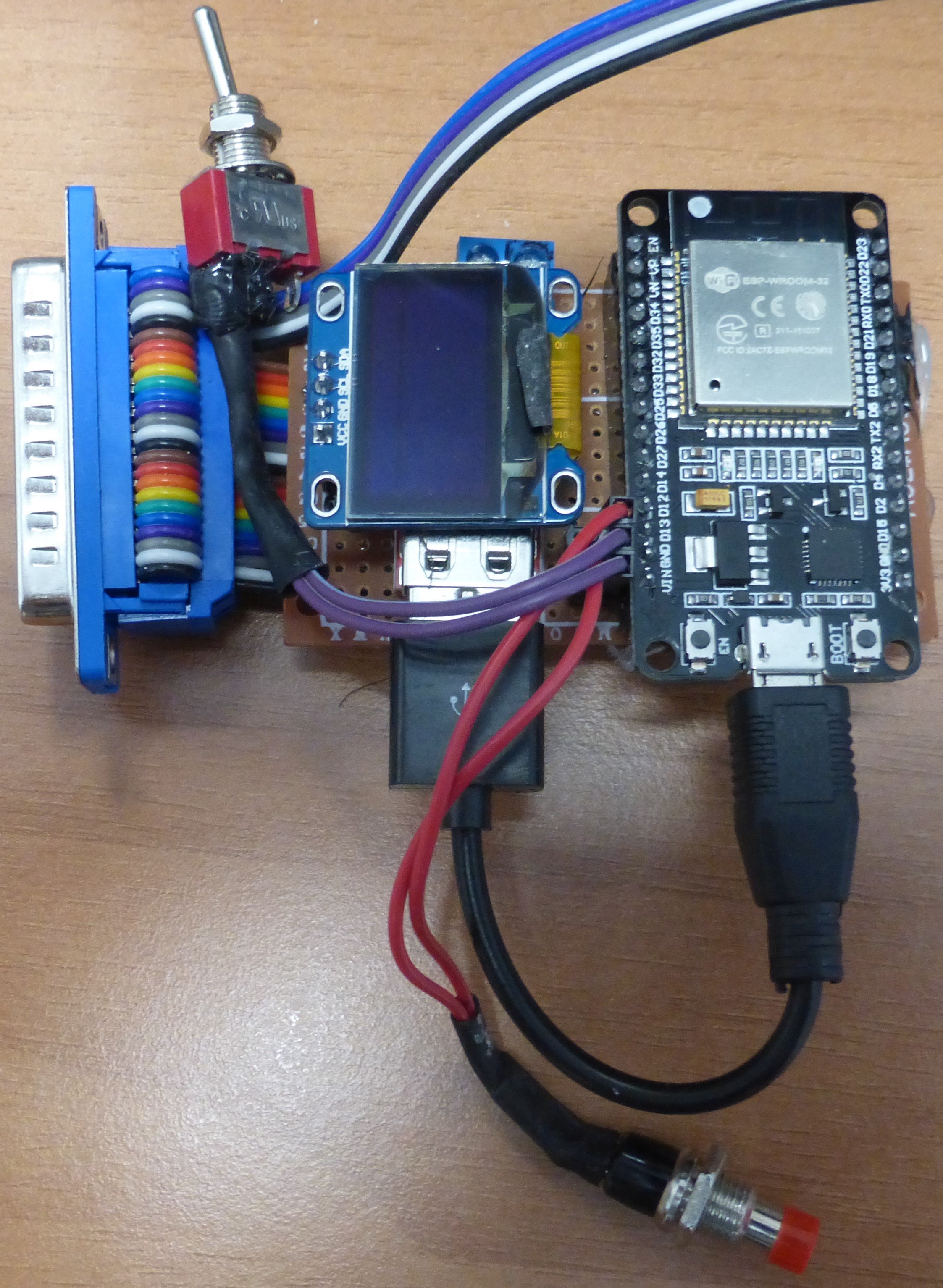
Las conexiones son las que aparecen en la imagen siguiente:
Para poder seleccionar entre el mando manual y el conector bluetooth/wifi se ha empledo un Data Switch antiguo.
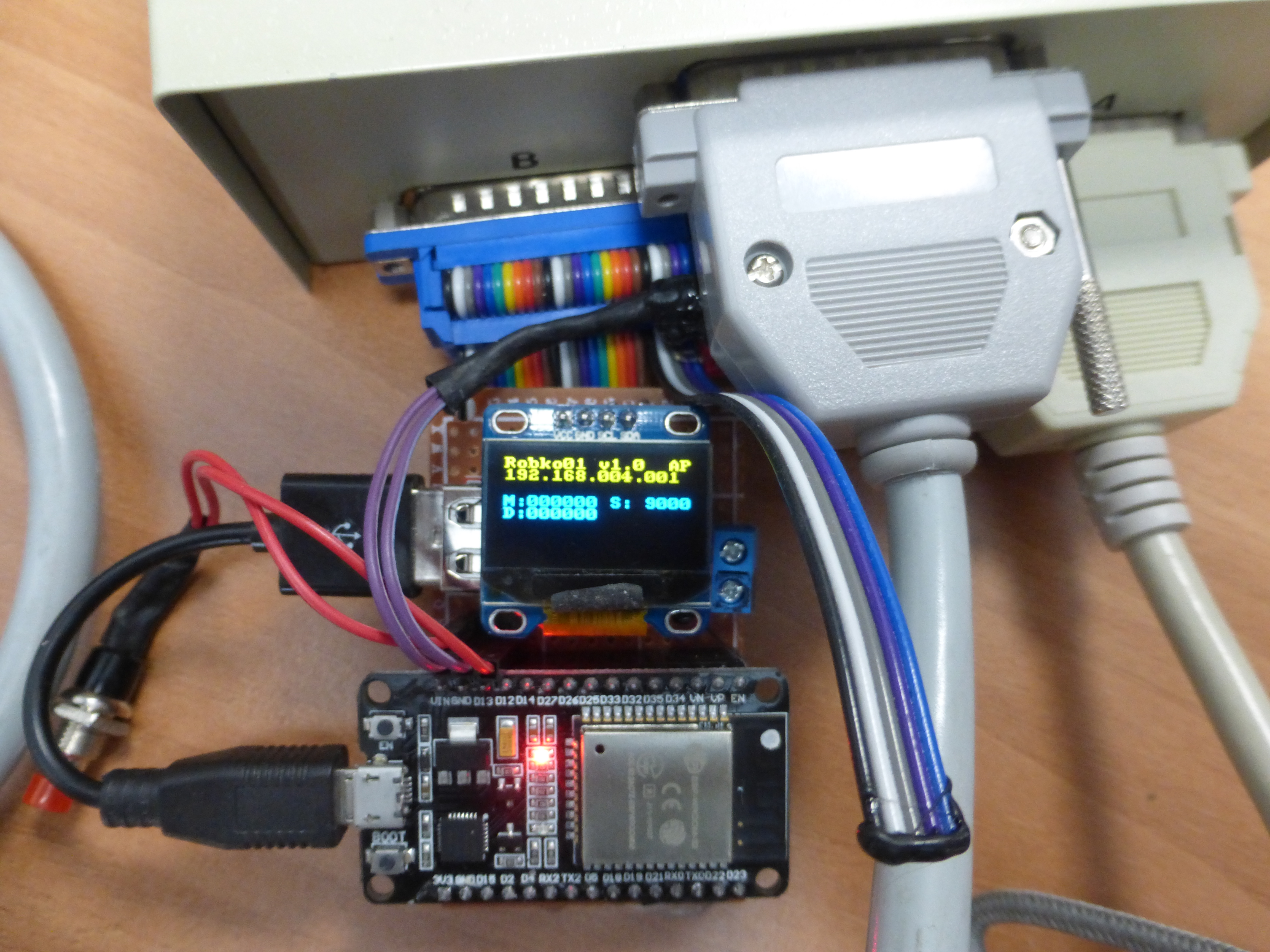
La pantalla TFT nos mostrará información de si está en modo bluetooth o wifi, la dirección IP, el estado de los motores, la velocidad….
Como prototipo se ha metido todo en una caja prefabricada


Resultado final
El resultado final obtenido es un brazo robótico “funcional” recuperado de los años 80s es cual en futuras versiones pueda ser manejado de una manera más “inteligente” mediante secuencias programadas, como se puede ver en vídeos y desarrollos relacionados, no solamente manejo manual (ya sea con los mandos o de manera remota).
La utilidad práctica es muy cuestionable, pero, ver un robot búlgaro de los años 80s de poleas funcionando no tiene precio.

Referencias:
- “Control of Educational Manipulator – ‘ROBKO 01′ with Modern Computer Architecture“, Valentin Nikolov, Technical University, Sofia (búlgaro, español)
- “The Michigan Minimover Robot Interface System“, Bruce B. Gaya, C.S.G. Lee, The University of Michigan, 1982 (inglés)
- “Manual de usuario ROBKO-01” (búlgaro)
- “MiniMover-5 User Reference And Applications Manual“, Microbot, 1980 (inglés)
- “Robotic Software for the mini-mover 5 robot arm“, Alexander Zelinsky, University of Wollongong, Australia, 1984 (inglés)
- “Colne Robotics Armdroid: The Small-System Robot“, Steven W, Leininger, BYTE Publications Inc, May 1982 (inglés)
- “ARMDROID Construction and Operation Manual“, Colne Robotics, 1981 (Introduction, Mechanics, Electronics, Software, Command Routines 1, Command Routines 2, Subroutines, Applications, Blueprints)
Vídeos:
- Robko 01:

- Brief demostration of Robko 01:

- Testing Robko 01:

- ROBKO 01 controlled via USB:

- Conveyor band for Robko 01:

- Robko 01 new USB multiple joint control:

- Minimover-5:

- Armdroid 1 – FUZE Basic:

- Armdroid at work:

Desarrollos Relacionados:
- Orlin Dimitrov: https://github.com/orlin369/Robko01
- Simeon Ivanov: https://github.com/SimeonSimeonovIvanov/ROBKO-01
- Aaron Klapheck’ Website: The MiniMover 5: https://sites.google.com/site/aaronklapheckswebsite/aaron-s-interests-and-projects/the-minimover-5
- Richard Morris, “ArmDroid 1″: https://armdroid1.blogspot.com/, https://github.com/Armdroid
Enlaces Relacionados:
- Robko 01:
- Manual de usuario (Búlgaro): https://www.slideshare.net/orlin369/technical-documentation-of-robko01-micro-robot-robotic-hand?next_slideshow=1
- Wikipedia: “ROBKO-01″: https://bg.wikipedia.org/wiki/%D0%A0%D0%BE%D0%B1%D0%BA%D0%BE_01
- Armdroid:
- http://www.senster.com/alex_zivanovic/armdroid/
- IMKO-1:
- Clones Apple II: https://www.zdnet.com/article/how-these-communist-era-apple-ii-clones-helped-shape-central-europes-it-sector/
- Wikipedia: “IMKO-01 (ИМКО-1)”: https://en.wikipedia.org/wiki/IMKO-1
- Old Computers Musseum: “IMKO-1/2 & Pravetz 82″: “https://en.wikipedia.org/wiki/IMKO-1″
- EasyDriver:




Se han bloqueado los comentarios.